ブログ内検索
カレンダー
| 10 | 2025/11 | 12 |
| S | M | T | W | T | F | S |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 |
最新記事
(06/05)
(05/18)
(04/17)
(04/02)
(03/13)
(03/06)
(01/17)
カテゴリー
アーカイブ
最新CM
(04/21)
(04/21)
(01/01)
(01/01)
(12/31)
(12/31)
(11/23)
最新TB
バーコード
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
先日のエビス走行でロギングしたGPSデータと加速度センサーのデータを比較してみました.
GPSデータは,Lap+で処理せず,時刻・緯度・経度データから,車速,旋回半径を算出し,最終的に前後・横加速度に変換します.
加速度センサーのデータは,車体のほぼ重心位置に取り付けていますが,ずれている分は補正無し.
また,いずれのデータも,勾配・カントの補正は無しです.
比較した結果がこれ↓
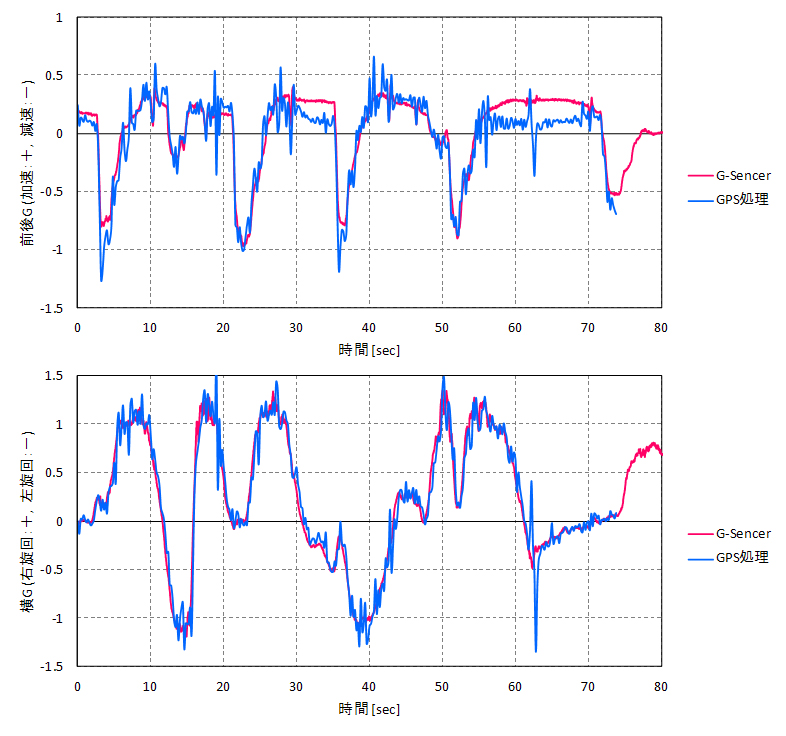
前後Gについては,勾配補正無しなので,
例えば上りでは,GPSの方が加速が鈍く,加速度センサーの方が加速度が大きく出ています.
横Gは,どちらもほとんど近い値ですね.
でも,本来であれば,カントの影響,車体スリップ角の影響(旋回中は,ノーズが内向きになるため,旋回横Gとセンサーの向きが異なる)などがあるため,補正無しでは同じにならないはず.
これは,偶然近い値になっていると考えて,より詳細な補正を入れるべきだと思っています.
(そこまで,詳細に解析する必要ないですが・・・.)
GPSのデータがガタガタしているのは,GPSの位置精度×座標変換×車速/旋回半径算出の精度がこんなモンなため.サンプリング周波数が5Hzなためこんな感じのギザギザ具合になっています.
一方,Gセンサーは,アナログセンサにローパスフィルタを噛まして,50Hzでデータを保存しています.
なので,データ上は比較的なめらかな特性になっています.
どっちがより正しいのかは不明.
まぁ,前後Gも横Gも,それぞれのセンサで見ている座標系が違う訳ですよね.
GPSは車の進行方向を基準にして,(標高データを取っていないので)平面上の2次元に変換された座標系で加速度表示しているのに対し,加速度センサーの方は車体に固定された座標系で加速度を表示しています.
この際,絶対値の正しさ議論は放っておいて,他の人と比較する際に同じ条件で見られていれば問題ないと思っています.
奥が深いですね.
GPSデータは,Lap+で処理せず,時刻・緯度・経度データから,車速,旋回半径を算出し,最終的に前後・横加速度に変換します.
加速度センサーのデータは,車体のほぼ重心位置に取り付けていますが,ずれている分は補正無し.
また,いずれのデータも,勾配・カントの補正は無しです.
比較した結果がこれ↓
前後Gについては,勾配補正無しなので,
例えば上りでは,GPSの方が加速が鈍く,加速度センサーの方が加速度が大きく出ています.
横Gは,どちらもほとんど近い値ですね.
でも,本来であれば,カントの影響,車体スリップ角の影響(旋回中は,ノーズが内向きになるため,旋回横Gとセンサーの向きが異なる)などがあるため,補正無しでは同じにならないはず.
これは,偶然近い値になっていると考えて,より詳細な補正を入れるべきだと思っています.
(そこまで,詳細に解析する必要ないですが・・・.)
GPSのデータがガタガタしているのは,GPSの位置精度×座標変換×車速/旋回半径算出の精度がこんなモンなため.サンプリング周波数が5Hzなためこんな感じのギザギザ具合になっています.
一方,Gセンサーは,アナログセンサにローパスフィルタを噛まして,50Hzでデータを保存しています.
なので,データ上は比較的なめらかな特性になっています.
どっちがより正しいのかは不明.
まぁ,前後Gも横Gも,それぞれのセンサで見ている座標系が違う訳ですよね.
GPSは車の進行方向を基準にして,(標高データを取っていないので)平面上の2次元に変換された座標系で加速度表示しているのに対し,加速度センサーの方は車体に固定された座標系で加速度を表示しています.
この際,絶対値の正しさ議論は放っておいて,他の人と比較する際に同じ条件で見られていれば問題ないと思っています.
奥が深いですね.
PR